ASR6601 Quick Start Guide
Introduction
About This Document
This document introduces the development environment setting, the compilation and download regarding IoT LPWAN SoC ASR6601 SDK. It is convenient for users to quickly develop programs based on ASR6601.
Included Chip Models
The product models corresponding to this document are as follows.
Model |
Flash |
SRAM |
Core |
Package |
Frequency |
|---|---|---|---|---|---|
ASR6601SE |
256 KB |
64 KB |
32-bit 48 MHz Arm China STAR-MC1 |
QFN68, 8*8 mm |
150 ~ 960 MHz |
ASR6601CB |
128 KB |
16 KB |
32-bit 48 MHz Arm China STAR-MC1 |
QFN48, 6*6 mm |
150 ~ 960 MHz |
ASR6601SER |
256 KB |
64 KB |
32-bit 48 MHz Arm China STAR-MC1 |
QFN68, 8*8 mm |
150 ~ 960 MHz |
ASR6601CBR |
128 KB |
16 KB |
32-bit 48 MHz Arm China STAR-MC1 |
QFN48, 6*6 mm |
150 ~ 960 MHz |
Copyright Notice
© 2022 ASR Microelectronics Co., Ltd. All rights reserved. No part of this document can be reproduced, transmitted, transcribed, stored, or translated into any language in any form or by any means without the written permission of ASR Microelectronics Co., Ltd.
Trademark Statement
ASR and ASR Microelectronics Co., Ltd. are trademarks of ASR Microelectronics Co., Ltd.
Other trade names, trademarks, and registered trademarks mentioned in this document are the property of their respective owners and are hereby declared.
Disclaimer
ASR does not give any warranty of any kind and may make improvements and/or changes in this document or in the product described in this document at any time.
This document is only used as a guide, and no contents in the document constitute any form of warranty. Information in this document is subject to change without notice.
All liability, including liability for infringement of any proprietary rights caused by using the information in this document, is disclaimed.
Revision History
Date |
Version |
Release Notes |
|---|---|---|
2020.05 |
V0.1.0 |
First release. |
2020.08 |
V0.2.0 |
Added descriptions about Keil environment. Added Q&A. |
2020.09 |
V0.3.0 |
Updated some pictures. |
2020.10 |
V0.4.0 |
Updated the pictures of ASR6601SE development board v2.0. |
2021.01 |
V1.1.0 |
Deleted Chapter 1, and move the contents to “About This Document”. |
2021.05 |
V1.2.0 |
Modified Chapter 3 to simplify the compilation process. |
2022.06 |
V1.3.0 |
Updated access to ASR SDK and GCC toolchain. |
1. Hardware Preparation
LoRa nodes hardware requirements:
1 ASR6601 development board
1 antenna
1 USB cable
1 PC
1.1 ASR6601 Development Board
ASR6601SE/SER development board v2.0 front and back photos are as follows:
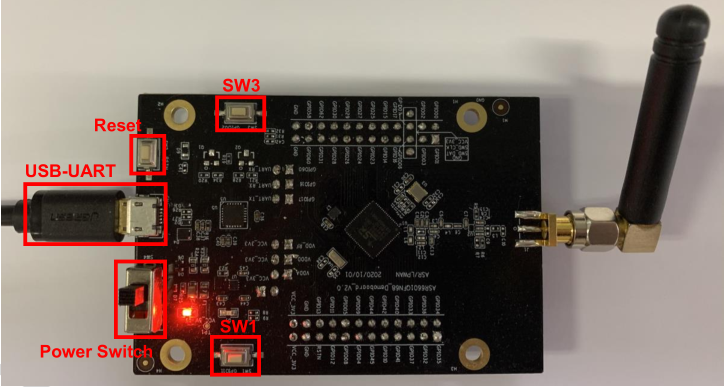
The Front View of ASR6601SE/SER Development Board v2.0

The Back View of ASR6601SE/SER Development Board v2.0
Interface |
Description |
|---|---|
USB-UART |
USB |
Power Switch |
Power switch |
Reset |
Reset button |
SW3 |
It’s the Download button pressed to pull up GPIO02 |
SW1 |
It’s the User button pressed to pull down GPIO11 |
JP1 |
Jumper1 |
JP2 |
Jumper2 |
JP3 |
Jumper3 |
JP4 |
Jumper4, which can be used to test the board’s total power consumption |
JP5 |
Connect UART_TX jumper, then select UART0_TX. Reference: Schematics |
JP6 (only used in ASR6601CB development board) |
Connect UART_TX jumper, then select LPUART_TX. Reference: Schematics |
JP7 |
Connect UART_TX jumper, then select UART0_RX. Reference: Schematics |
JP8 |
Connect UART_TX jumper, then select LPUART_RX. Reference: Schematics |
1.2 Jumper Connection
When testing ASR6601 development board, please make sure the following jumpers’ state is set correctly.
Jumper |
Connection State |
|---|---|
JP1 |
connected |
JP2 |
connected |
JP3 |
connected |
JP4 |
connected |
JP5 |
connected |
JP6 (only used in ASR6601CB development board) |
Not connected |
JP7 |
connected |
JP8 |
Not connected |
2. Development under Keil
2.1 Connection to JLINK

SWD Interfaces
When using Jlink, ASR6601 needs 4 wires. Connect the interface 1, 7, 9 and 20 of Jlink to the corresponding pins on the board. Please note that connecting the RESET pin of J-LINK to the RESET pin of ASR6601 is prohibited, as it may lead to flash erasure.
2.2 SDK Acquisition
You can contact ASR technical support engineers to get SDK or download it from GitHub using the following command.
git clone https://github.com/asrlora/asr_lora_6601.git
2.3 Keil Project File Generation
There is no Keil project file in SDK. Developers can run keil.bat in example project folder to generate it.
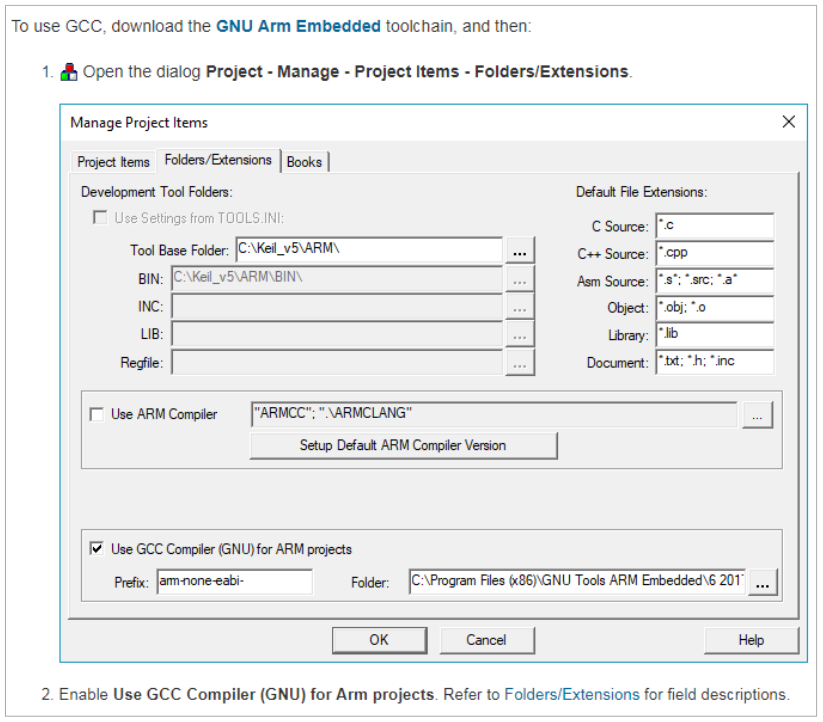
2.4 GCC Tool Chains Configuration
Download the GNU Arm Embedded Toolchain zip file from the link below, and then unzip it. https://developer.arm.com/-/media/Files/downloads/gnu-rm/9-2020q2/gcc-arm-none-eabi-9-2020-q2-update-win32.zip
Set GCC tool chains according to the Keil user guide from the below link: https://www.keil.com/support/man/docs/uv4/uv4_gnucomp.htm
Set “Tool Base Folder” to the directory of the decompressed tool chains, for example, D:\ASR6601_rel\tools\toolchain
2.5 Flash Programming Algorithm Config
First, copy the ASR6601.FLM file under \tools\FLM directory to Flash directory within Keil, for example, C:\Keil_v5\ARM\Flash.
If the download failed, please edit the configurations on the Flash Download tab according to the Keil user guide from the below link: https://www.keil.com/support/man/docs/uv4/uv4_fl_dlconfiguration.htm
Mainly configure the following items:
Download Function: Select “Erase Sectors”, check “Program” and “Verify”
RAM for Algorithm: Set “Start” to 0x20000000, “Size” to 0x2000
Programming Algorithm: Add the Flash Programming Algorithm file for ASR6601

2.6 Compilation and Download
Click “Build” to compile
Click “Download” to flash
3. Make Command Lines
3.1 Preparation
3.1.1 Development Environment Installation
3.1.1.1 Ubuntu (Version 18.04)
Run the following command to install Python and other necessary software:
sudo apt-get install gcc-arm-none-eabi git vim python python-pip
pip install pyserial configparser
3.1.1.2 Windows
Install MSYS2
Log in to https://www.msys2.org/ to download the installation package and install it as required.
Install Related Software
Open MSYS2, then install software:
pacman -S git vim make unzip python python-pip wgetUse pip to install Pyserial:
pip install pyserial configparser
3.1.2 SDK Acquisition
You can contact ASR technical support engineers to get SDK or download it from GitHub using the following command.
git clone https://github.com/asrlora/asr_lora_6601.git
3.2 Compilation and Download
Take the example of uart_printf project to elaborate the the software compilation and download process.
3.2.1 Build the Project
Build the project as follows:
Run the command to configure environment variables:
source build/envsetup.shEnter uart_printf directory:
cd projects/ASR6601CB-EVAL/examples/uart/uart_printfRun the make command to compile the program:
make
It will show as the following after successful compilation:
Build completed.
arm-none-eabi-size out/uart_printf.elf
text data bss dec hex filename
9972 1080 4164 15216 3b70 out/uart_printf.elf
Please run 'make flash' or the following command to download the app
python /home/ruilinhao/work/ASR6601_rel/build/scripts/tremo_loader.py -p /dev/ttyUSB0 -b 921600 flash 0x08000000 out/uart_printf.bin
3.2.2 Download
There are two methods to download:
Use Tremo programmer, see ASR6601_Tremo Programmer Tool User Guide for details.
Use command line.
The following introduces the steps of downloading with command line:
Config Serial Port
First, run the command
ls /dev/to check the serial port of ASR6601 development board.Usually, there is a ttyS* device under MSYS2. This device corresponds to one COM port number under Windows. For example, COM6 corresponds to /dev/ttyS5 in MSYS2, and the serial device is usually /dev/ttyUSB* under Ubuntu.
Find the right serial device, edit the Makefile in uart_printf program, erase the “#” before SERIAL_PORT, and edit SERIAL_PORT to the responding serial number.
If there are no special requirements, developers can use the default value of SERIAL_BUADRATE and $(PROJECT)_ADDRESS.
SERIAL_PORT :=/dev/ttyS5 #SERIAL_BAUDRATE := #$(PROJECT)_ADDRESS :=
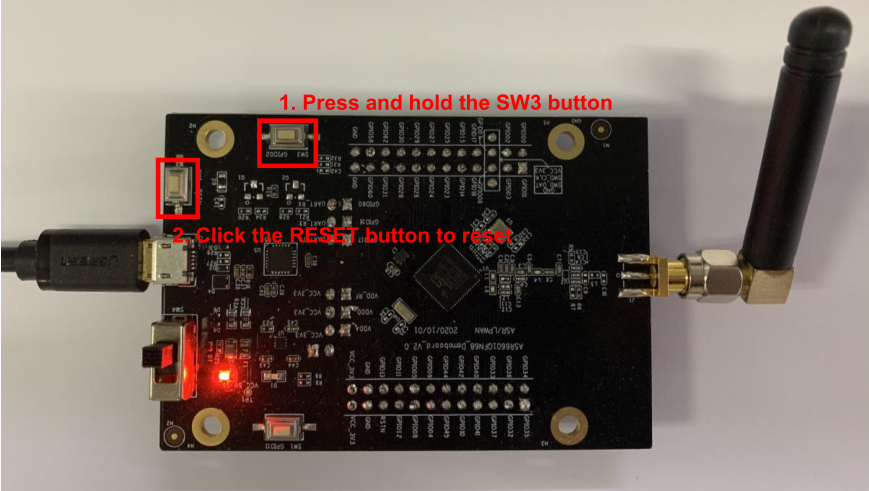
Enter Download Mode
Press and hold the SW3 button on the board to pull up GPIO02, and then click the Reset button to reboot the board. After that it will be in download mode.
Execute Download
Run
make flashcommand or use tremo_loader.py to download files.If the download is successful, developers will see the following information. If it keeps failing, please refer to Chapter 4 Q&A.
Connecting... Connected ('send: ', 512) ('send: ', 1024) ('send: ', 1536) ('send: ', 2048) ('send: ', 2560) ('send: ', 3072) ('send: ', 3584) ('send: ', 4096) ('send: ', 4100) Download files successfully
3.2.3 Operation
After the download, restart the ASR6601 development board, and then the program will run properly. hello world will be printed on the serial tool interface.
4. Q&A
4.1 Why doesn’t “SW Device” display when using Keil?
There are two possibilities for that:
There are some problems with the hardware connection. Developers can check the wiring and power supply, etc.
Hard faults occurred or MCU entered the low power mode, etc., which caused this problem. Developers can pull up GPIO02 with Dupont line, and then restart the board. In this way, MCU will be in bootloader mode to pop up “SW device” and to download files.
4.2 What to do if the responding serial device cannot be found when using MSYS2?
The responding serial device cannot be found if its device port number excess the maximum (64 or 128, based on the version) in MSYS2. Thus the serial device will be displayed if the port number gets smaller.
4.3 What to do if the download keeps failing in MSYS2, while the serial device is displayed?
Check if other software opened that serial port, such as a serial tool.
For some Windows versions, using /dev/ttyS* directly will cause download to fail. Try to modify SERIAL_PORT to COM* in the Makefile.